Ozz n426
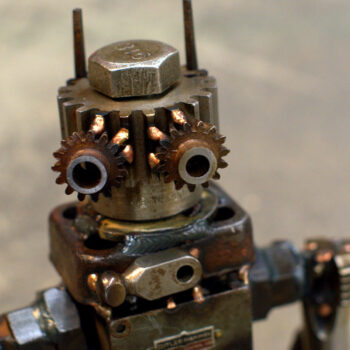
Ozz is the first Neutrino-class Astrobot that has ball-bearing feet: even though they don’t actually spin, he slides better than a lot of my wheeled robots can roll. His dome head had been masquerading as a stainless measuring spoon before reaching its final form – the ‘nose’ of Ozz is all that’s left of the handle.
I connected this spoon-head to the ‘spinal’ bolt by drilling a hole on the top of the dome, plug-welding it to the bolt, then filing and finishing out the top so to be smooth again. Machinists may relate to the folly that ensued when trying to coax a starter drill-bit to keep from spiraling off the top of the dome with nothing but a laser-guided bench-top drill press, a Starrett starter punch, some EZ tap, and a lot of please please please. But the deed is done and victory feels good.
Ozz is particularly proud of the smart little bronze buttons on his chest – you’ll have to use your imagination as to what function they may perform at any given moment. He also has a little ‘duck tail’ handle on the back of his head that can be used to animate his head, which rotates left to right, but not all the way around. The lower part of the handle serves as a stop for the head rotation – which means he can’t see behind himself very well, but he’s got great hearing and can turn around quickly.
The neck joint is fairly loose so his head can bob around a bit, which gives him some playful character animation possibilities.
I like to think of Neutrino class robots to be the robot companions for the rest of my robots. Ozz is quite capable in that role, but can also take on solo missions with grace and determination.
1 lb, 14.5 oz.
3 x 2.5 x 2.25″
This piece has sold
If you're interested in something inspired by this piece, please let me know. Other works are available.